CenterNet之loss计算代码解析¶
[GiantPandaCV导语] 本文主要讲解CenterNet的loss,由偏置部分(reg loss)、热图部分(heatmap loss)、宽高(wh loss)部分三部分loss组成,附代码实现。
1. 网络输出¶
论文中提供了三个用于目标检测的网络,都是基于编码解码的结构构建的。
- ResNet18 + upsample + deformable convolution : COCO AP 28%/142FPS
- DLA34 + upsample + deformable convolution : COCO AP 37.4%/52FPS
- Hourglass104: COCO AP 45.1%/1.4FPS
这三个网络中输出内容都是一样的,80个类别,2个预测中心对应的长和宽,2个中心点的偏差。
# heatmap 输出的tensor的通道个数是80,每个通道代表对应类别的heatmap
(hm): Sequential(
(0): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace)
(2): Conv2d(64, 80, kernel_size=(1, 1), stride=(1, 1))
)
# wh 输出是中心对应的长和宽,通道数为2
(wh): Sequential(
(0): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace)
(2): Conv2d(64, 2, kernel_size=(1, 1), stride=(1, 1))
)
# reg 输出的tensor通道个数为2,分别是w,h方向上的偏移量
(reg): Sequential(
(0): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace)
(2): Conv2d(64, 2, kernel_size=(1, 1), stride=(1, 1))
)
2. 损失函数¶
2.1 heatmap loss¶
输入图像I\in R^{W\times H\times 3}, W为图像宽度,H为图像高度。网络输出的关键点热图heatmap为\hat{Y}\in [0,1]^{\frac{W}{R}\times \frac{H}{R}\times C}其中,R代表得到输出相对于原图的步长stride。C代表类别个数。
下面是CenterNet中核心loss公式:
这个和Focal loss形式很相似,\alpha和\beta是超参数,N代表的是图像关键点个数。
- 在Y_{xyc}=1的时候,
对于易分样本来说,预测值\hat{Y}_{xyc}接近于1, (1-\hat{Y}_{xyc})^\alpha 就是一个很小的值,这样loss就很小,起到了矫正作用。
对于难分样本来说,预测值\hat{Y}_{xyc}接近于0, (1-\hat{Y}_{xyc})^\alpha 就比较大,相当于加大了其训练的比重。
- otherwise的情况下:
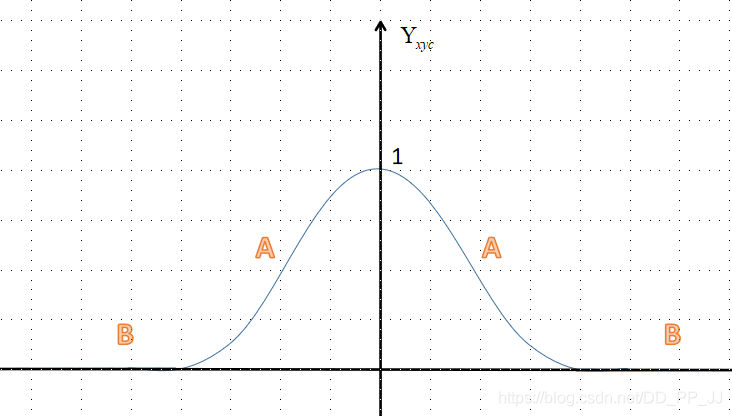
上图是一个简单的示意,纵坐标是{Y}_{xyc},分为A区(距离中心点较近,但是值在0-1之间)和B区(距离中心点很远接近于0)。
对于A区来说,由于其周围是一个高斯核生成的中心,Y_{xyc}的值是从1慢慢变到0。
举个例子(CenterNet中默认\alpha=2,\beta=4):
Y_{xyc}=0.8的情况下,
- 如果\hat{Y}_{xyc}=0.99,那么loss=(1-0.8)^4(0.99)^2log(1-0.99),这就是一个很大的loss值。
- 如果\hat{Y}_{xyc}=0.8, 那么loss=(1-0.8)^4(0.8)^2log(1-0.8), 这个loss就比较小。
-
如果\hat{Y}_{xyc}=0.5, 那么loss=(1-0.8)^4(0.5)^2log(1-0.5),
-
如果\hat{Y}_{xyc}=0.99,那么loss=(1-0.5)^4(0.99)^2log(1-0.99),这就是一个很大的loss值。
- 如果\hat{Y}_{xyc}=0.8, 那么loss=(1-0.5)^4(0.8)^2log(1-0.8), 这个loss就比较小。
- 如果\hat{Y}_{xyc}=0.5, 那么loss=(1-0.5)^4(0.5)^2log(1-0.5),
总结一下:为了防止预测值\hat{Y}_{xyc}过高接近于1,所以用(\hat{Y}_{xyc})^\alpha来惩罚Loss。而(1-Y_{xyc})^\beta这个参数距离中心越近,其值越小,这个权重是用来减轻惩罚力度。
对于B区来说,\hat{Y}_{xyc}的预测值理应是0,如果该值比较大比如为1,那么(\hat{Y}_{xyc})^\alpha作为权重会变大,惩罚力度也加大了。如果预测值接近于0,那么(\hat{Y}_{xyc})^\alpha会很小,让其损失比重减小。对于(1-Y_{xyc})^\beta来说,B区的值比较大,弱化了中心点周围其他负样本的损失比重。
2.2 offset loss¶
由于三个骨干网络输出的feature map的空间分辨率变为原来输入图像的四分之一。相当于输出feature map上一个像素点对应原始图像的4x4的区域,这会带来较大的误差,因此引入了偏置值和偏置的损失值。设骨干网络输出的偏置值为\hat{O}\in R^{\frac{W}{R}\times \frac{H}{R}\times 2}, 这个偏置值用L1 loss来训练:
p代表目标框中心点,R代表下采样倍数4,\tilde{p}=\lfloor \frac{p}{R} \rfloor, \frac{p}{R}-\tilde{p}代表偏差值。
2.3 size loss/wh loss¶
假设第k个目标,类别为c_k的目标框的表示为(x_1^{(k)},y_1^{(k)},x_2^{(k)},y_2^{(k)}),那么其中心点坐标位置为(\frac{x_1^{(k)}+x_2^{(k)}}{2}, \frac{y_1^{(k)}+y_2^{(k)}}{2}), 目标的长和宽大小为s_k=(x_2^{(k)}-x_1^{(k)},y_2^{(k)}-y_1^{(k)})。对长和宽进行训练的是L1 Loss函数:
其中\hat{S}\in R^{\frac{W}{R}\times \frac{H}{R}\times 2}是网络输出的结果。
2.4 CenterNet Loss¶
整体的损失函数是以上三者的综合,并且分配了不同的权重。
其中\lambda_{size}=0.1, \lambda_{offsize}=1
3. 代码解析¶
来自train.py中第173行开始进行loss计算:
# 得到heat map, reg, wh 三个变量
hmap, regs, w_h_ = zip(*outputs)
regs = [
_tranpose_and_gather_feature(r, batch['inds']) for r in regs
]
w_h_ = [
_tranpose_and_gather_feature(r, batch['inds']) for r in w_h_
]
# 分别计算loss
hmap_loss = _neg_loss(hmap, batch['hmap'])
reg_loss = _reg_loss(regs, batch['regs'], batch['ind_masks'])
w_h_loss = _reg_loss(w_h_, batch['w_h_'], batch['ind_masks'])
# 进行loss加权,得到最终loss
loss = hmap_loss + 1 * reg_loss + 0.1 * w_h_loss
上述transpose_and_gather_feature函数具体实现如下,主要功能是将ground truth中计算得到的对应中心点的值获取。
def _tranpose_and_gather_feature(feat, ind):
# ind代表的是ground truth中设置的存在目标点的下角标
feat = feat.permute(0, 2, 3, 1).contiguous()# from [bs c h w] to [bs, h, w, c]
feat = feat.view(feat.size(0), -1, feat.size(3)) # to [bs, wxh, c]
feat = _gather_feature(feat, ind)
return feat
def _gather_feature(feat, ind, mask=None):
# feat : [bs, wxh, c]
dim = feat.size(2)
# ind : [bs, index, c]
ind = ind.unsqueeze(2).expand(ind.size(0), ind.size(1), dim)
feat = feat.gather(1, ind) # 按照dim=1获取ind
if mask is not None:
mask = mask.unsqueeze(2).expand_as(feat)
feat = feat[mask]
feat = feat.view(-1, dim)
return feat
3.1 hmap loss代码¶
调用:hmap_loss = _neg_loss(hmap, batch['hmap'])
def _neg_loss(preds, targets):
''' Modified focal loss. Exactly the same as CornerNet.
Runs faster and costs a little bit more memory
Arguments:
preds (B x c x h x w)
gt_regr (B x c x h x w)
'''
pos_inds = targets.eq(1).float()# heatmap为1的部分是正样本
neg_inds = targets.lt(1).float()# 其他部分为负样本
neg_weights = torch.pow(1 - targets, 4)# 对应(1-Yxyc)^4
loss = 0
for pred in preds: # 预测值
# 约束在0-1之间
pred = torch.clamp(torch.sigmoid(pred), min=1e-4, max=1 - 1e-4)
pos_loss = torch.log(pred) * torch.pow(1 - pred, 2) * pos_inds
neg_loss = torch.log(1 - pred) * torch.pow(pred,
2) * neg_weights * neg_inds
num_pos = pos_inds.float().sum()
pos_loss = pos_loss.sum()
neg_loss = neg_loss.sum()
if num_pos == 0:
loss = loss - neg_loss # 只有负样本
else:
loss = loss - (pos_loss + neg_loss) / num_pos
return loss / len(preds)
代码和以上公式一一对应,pos代表正样本,neg代表负样本。
3.2 reg & wh loss代码¶
调用:reg_loss = _reg_loss(regs, batch['regs'], batch['ind_masks'])
调用:w_h_loss = _reg_loss(w_h_, batch['w_h_'], batch['ind_masks'])
def _reg_loss(regs, gt_regs, mask):
mask = mask[:, :, None].expand_as(gt_regs).float()
loss = sum(F.l1_loss(r * mask, gt_regs * mask, reduction='sum') /
(mask.sum() + 1e-4) for r in regs)
return loss / len(regs)
4. 参考¶
https://zhuanlan.zhihu.com/p/66048276
http://xxx.itp.ac.cn/pdf/1904.07850
本文总阅读量次