前言¶
上周介绍了Gaussian YOLOv3以及GHM Loss,这周我们来看看斯坦福大学和澳大利亚阿德莱德大学在CVPR2019发表的《Generalized Intersection over Union: A Metric and A Loss for Bounding Box Regression》,论文的核心就是提出了一个新的Loss,叫做GIOU Loss,论文原文地址见附录。
背景¶
前面介绍了很多Anchor-Based的目标检测算法,它们的Loss普遍使用bbox和ground truth bbox的L1范数,L2范数来计算位置回归Loss。但在评测的时候却使用IOU(交并比)去判断是否检测到目标。显然这两者并不是完全等价的,论文中举了Figure 1作为例子:
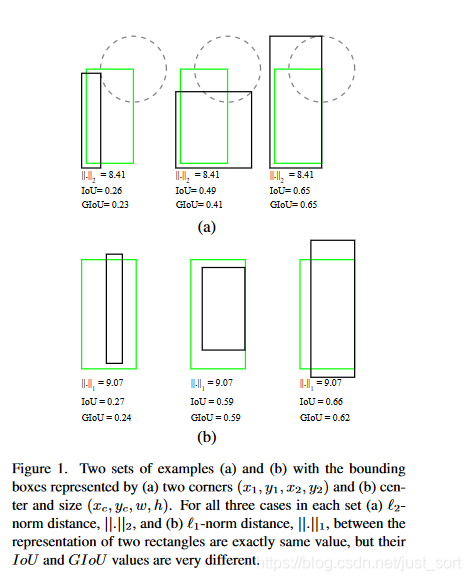
图中第一行,所有目标的L1 Loss都一样,但是第三个的IOU显然是要大于第一个,并且第3个的检测结果似乎也是好于第一个的。第二行类似,所有目标的L1 Loss也都一样,但IOU却存在差异。因此使用bbox和ground truth bbox的L1范数,L2范数来计算位置回归Loss以及在评测的时候却使用IOU(交并比)去判断是否检测到目标是有一个界限的,这两者并不等价。因此,一种直观的想法就是直接将IOU作为Loss来优化任务,但这存在两个问题:
- 预测框bbox和ground truth bbox如果没有重叠,IOU就始终为0并且无法优化。也就是说损失函数失去了可导的性质。
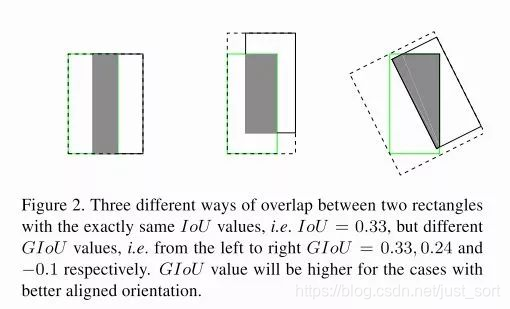
- IOU无法分辨不同方式的对齐,例如方向不一致等,如下图所示,可以看到三种方式拥有相同的IOU值,但空间却完全不同。
GIoU¶
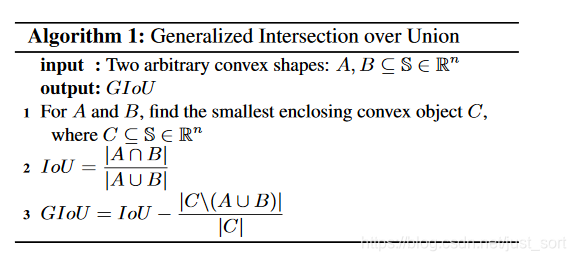
因此为了解决上面两个问题,这篇论文提出了GIOU。GIOU指的是假设现在有两个任意的bbox A和B,我们要找到一个最小的封闭形状C,让C可以将A和B包围在里面,然后我们计算C中没有覆盖A和B的面积占C总面积的比例,然后用A和B的IOU值减去这个比值,具体过程用下面的算法1来表示:
GIoU相比于IoU有如下性质:
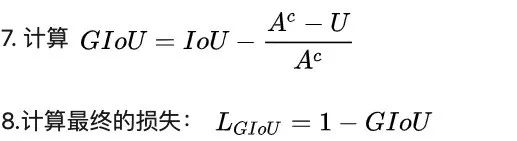
- 和IoU类似,GIoU也可以作为一个距离,然后损失可以用下面的公式来计算: L_{GIoU}=1-GIoU
- 和原始的IoU类似,GIoU对物体的尺度大小不敏感(因为比值的原因),并且GIoU<=IoU,而0<=IoU<=1,所以-1<=GIoU<=1,当预测bbox A和ground truth bbox B完全重合时IoU=GIoU=1。
- 由于GIoU引入了包含A,B两个框的C,所以当A,B不重合时也同样可以计算。
GIoU Loss¶
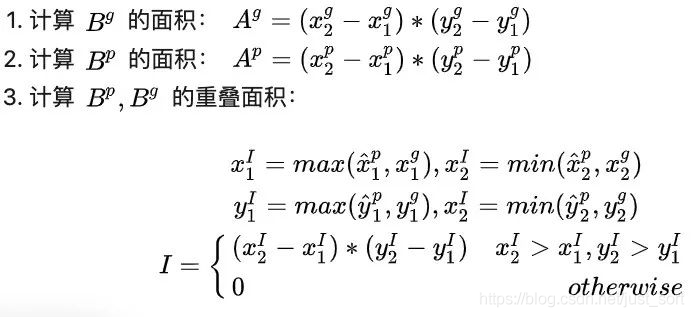
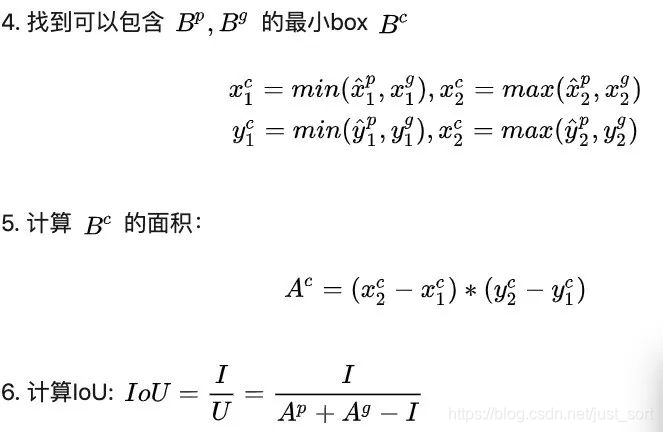
针对二维图像的目标检测,具体如何计算GIoU Loss呢?假设现在预测的bbox和ground truth bbox的坐标分别表示为:

其中,x_2^p>x_1^p,y_2^p>y_1^p。然后计算Loss的具体过程可以表示为:
实验¶
论文给出了一些实验结果,(针对分割任务和分类任务有一定 loss 的调整设计,不过论文中没有详细给出)结果是 IoU loss 可以轻微提升使用 MSE 作为 loss 的表现,而 GIoU 的提升幅度更大,这个结论在 YOLO 算法和 faster R-CNN 系列上都是成立的。具体的实验结果如下所示:
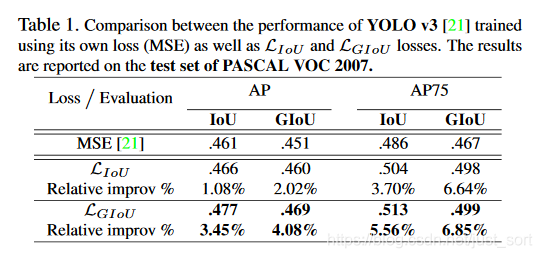
使用YOLOv3在PASCAL VOC 2007上的测试结果。AP值大概涨了近2个百分点。
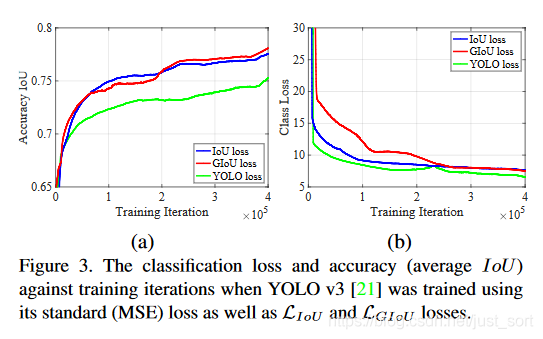
使用YOLOv3在MS COCO上测试,关注分类损失和准确率(平均IoU值),可以看到GIoU loss提升了准确率。
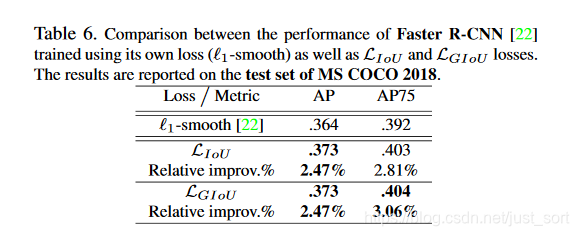
使用Faster-RCNN在PASCAL VOC 2007上的测试结果,坐标回归损失使用的L1损失。AP值大概涨了1个百分点。
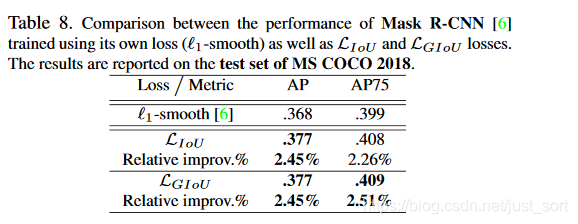
使用Mask-RCNN在MS COCO 2018上的测试结果,坐标回归损失使用的L1损失。AP值大概涨了小于1个百分点。
附录¶
论文原文:https://arxiv.org/abs/1902.09630
开源代码:https://github.com/generalized-iou/g-darknet
AlexAB版本Darknet支持了GIOU Loss:https://github.com/AlexeyAB/darknet/blob/master/cfg/yolov3.coco-giou-12.cfg
参考文章:https://zhuanlan.zhihu.com/p/63389116
结论¶
这篇论文用IOU作文章提出了GIoU Loss,最终YOLO V3涨了2个点,Faster RCNN,MaskRCNN这种涨点少了些。我猜测原因在于Faster RCNN,MaskRCNN本身的Anchor很多,出现完全无重合的情况比较少,这样GIOU和IOU Loss就无明显差别,所以提升不是太明显。
后记¶
今天就讲到这里了,有什么问题欢迎留言交流哦。
欢迎关注我的微信公众号GiantPandaCV,期待和你一起交流机器学习,深度学习,图像算法,优化技术,比赛及日常生活等。
本文总阅读量次