看了不少的目标检测论文了,个人认为多数论文的出发点就两个,一是感受野,二是特征融合。此外,解决数据不平衡和轻量化也是另外两个重要的方向。今天要讲解的RFBNet就是从感受野角度来改善了SSD检测器。
1. 前言¶
今天为大家科普一篇ECCV 2018的一篇目标检测网络RFBNet,论文全名为:Receptive Field Block Net for Accurate and Fast Object Detection 。这篇论文主要的贡献点主要是在SSD网络中提出了一个Receptive Field Block (RFB) 模块,RFB模块主要是在Inception的基础上加入了空洞卷积层从而有效的增大了感受野。另外,RFB模块是嵌在SSD上的,所以检测的速度比较快,精度比SSD更高。
2. RFB模块¶
RFB模块的效果示意图如Figure2所示,其中虚线部分就是指RFB模块。
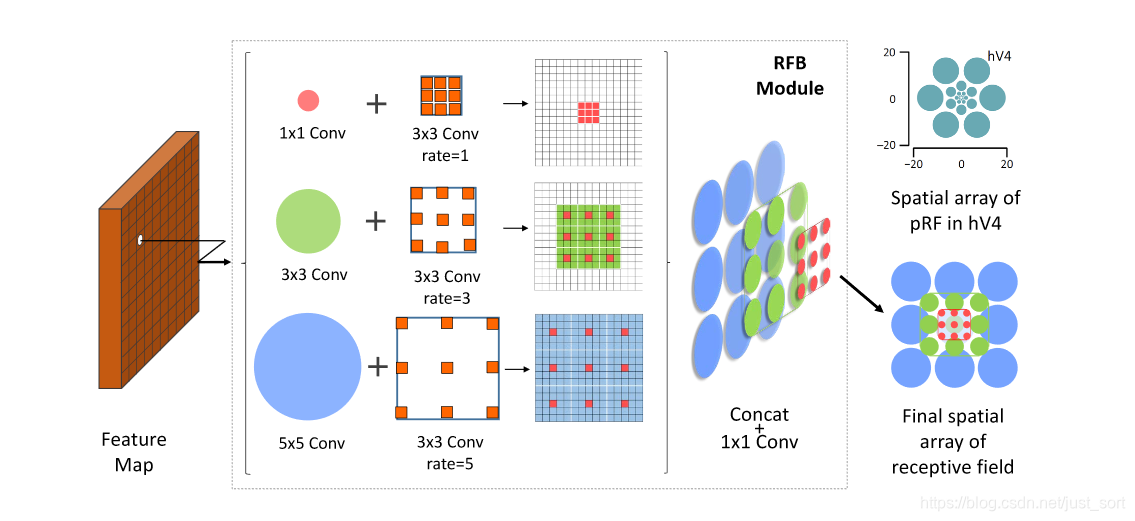
RFB模块主要有两个特点:
- RFB模块有多个分支,每个分支的第一层都由特定大小卷积核的卷积核构成,例如图上的1\times 1, 3\times 3,5\times 5。
- RFB模块引入了空洞卷积,主要作用是为了增加感受野,空洞卷积之前是应用在分割网络DeepLab中,这里将其应用在检测任务中,以获得更大的感受野,可以更好的编码空间长距离语义。
在RFB模块中,最后将不同尺寸和感受野的输出特征图进行Concat操作,以达到融合不同特征的目的。在Figure2中,RFB模块中使用三种不同大小和颜色的输出叠加来展示。在Figure2的最后一列中将融合后的特征与人类视觉感受野做对比,从图中看出是非常接近的,这也是这篇论文的出发点。
3. 两种RFB结构示意图¶
下面的Figure4展示了RFBNet的两种结构。
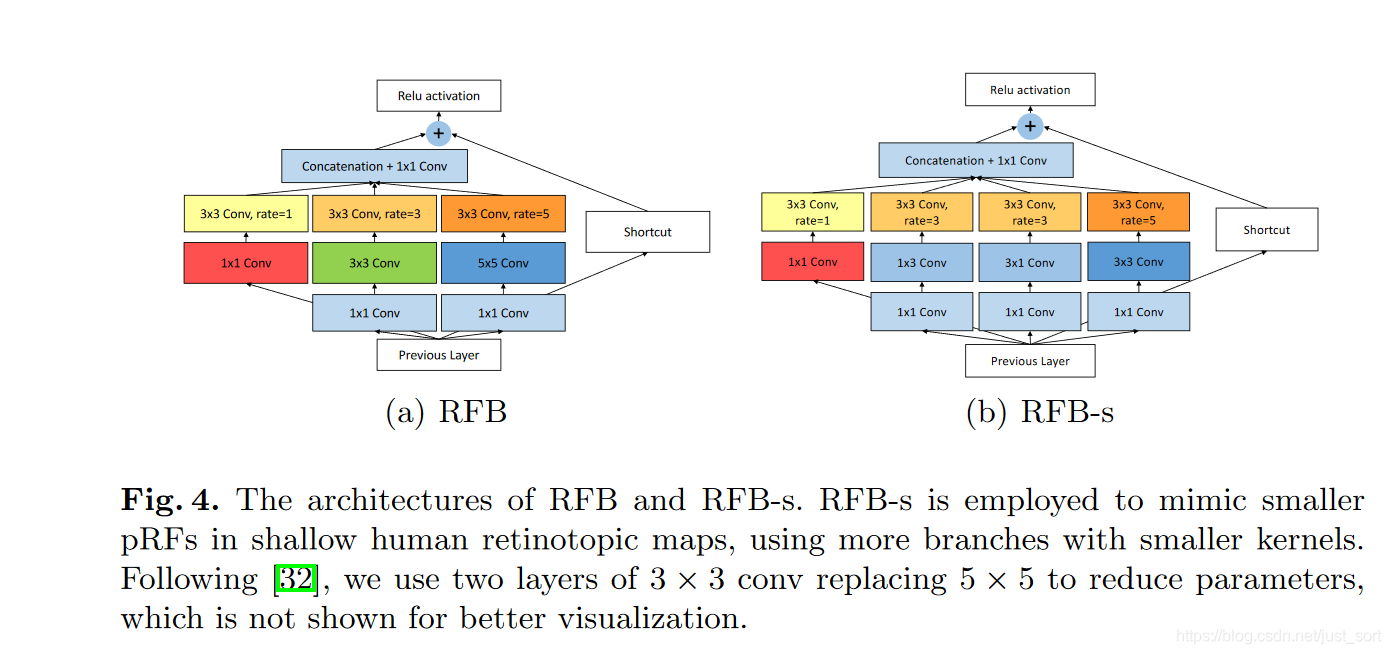
- Figure4(a)表示RFB结构,整体上借鉴了Inception的思想。主要不同点在于引入3个空洞卷积层。
- Figure4(b)表示RFB-s结构。RFB-s和RFB相比主要有两个改进,一方面用3\times 3卷积层代替5\times 5卷积层,另一方面用1\times 3和3\times 1卷积层代替3\times 3卷积层,主要目的应该是为了减少计算量,类似Inception后面的版本对Inception结构的改进。
4. RFBNet-300的结构¶
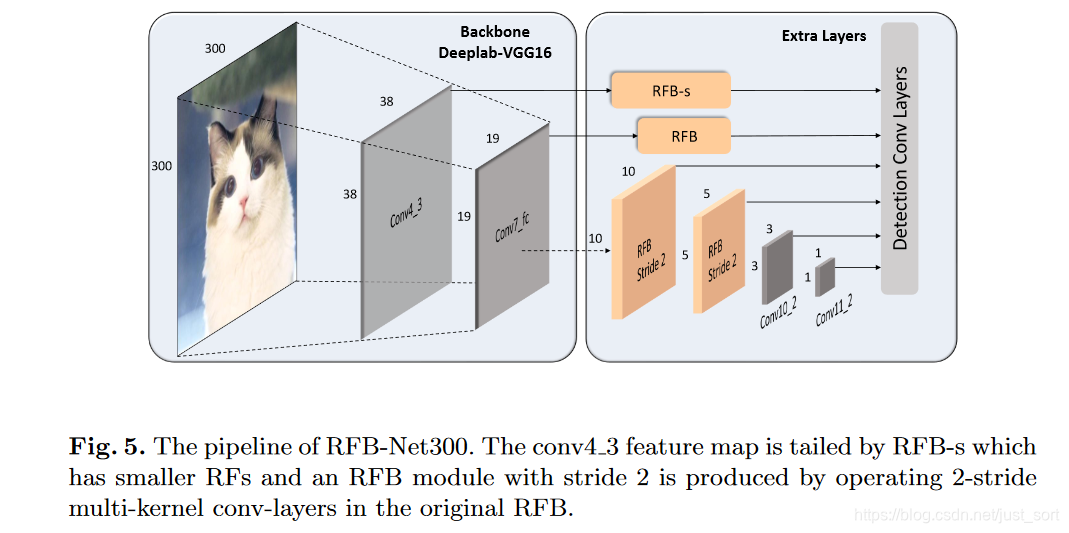
下面的Figure5代表RFBNet-300的整体结构图,基本是照搬了SSD,主要有2点不同:
- BackBone部分用两个RFB结构替换原来新增的两层。
conv4_3和conv7_fc在接预测层之前分别接RFB-s和RFB结构。
5. 实验结果¶
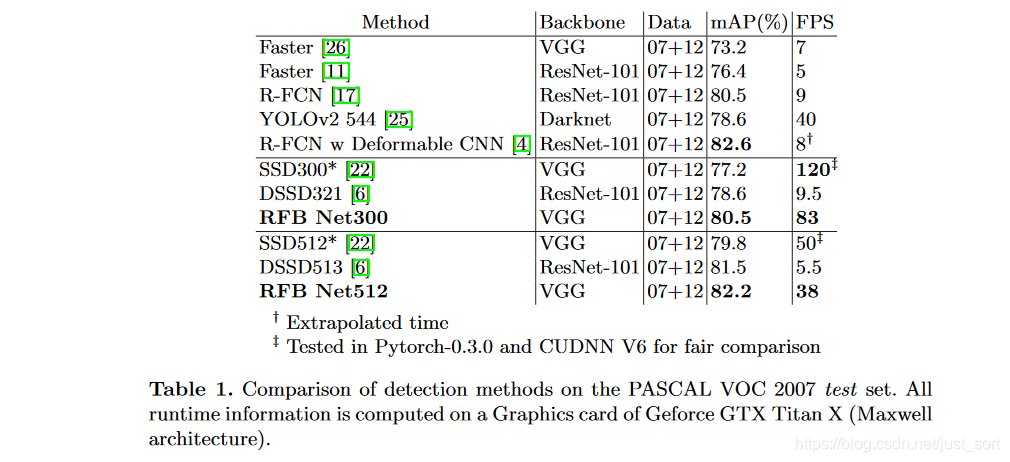
下面的Table1展示了RFBNet-300在PASCAL VOC2007 test dev上的测试结果,训练集基于2007和2012的trainval。RFBNet-300在mAP和FPS两方面效果都不错。
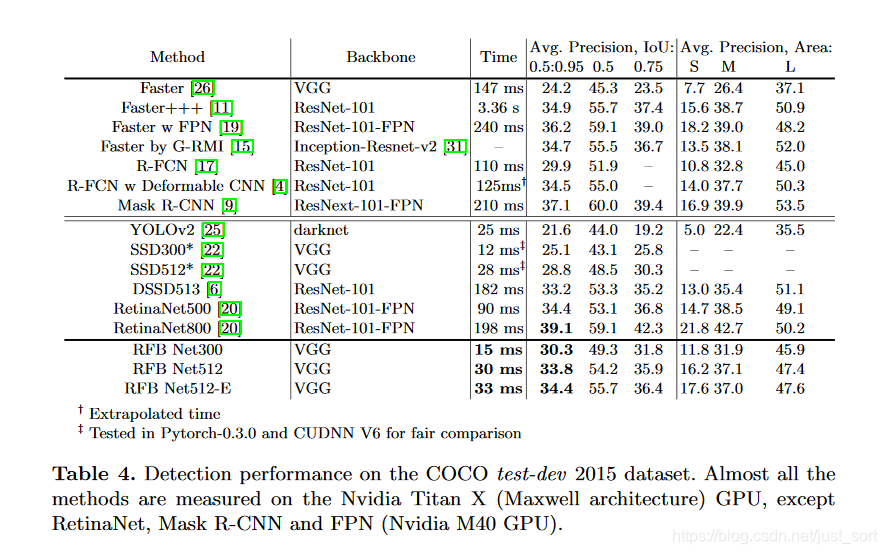
而下面的Table4是在COCO test dev 2015数据集上的测试结果。最后的RFBNet-512E做了两个改变:
- 对
conv7_fc的输出特征做了up-sample,然后和conv4_3的输出特征做融合,基于融合后的特征做预测。这种做法实际上是借鉴了FPN算法的思想。 - RFB结构中增加了
7x7大小的卷积分支。这两点改进对效果的提升有一定帮助,而且带来的计算量也少。
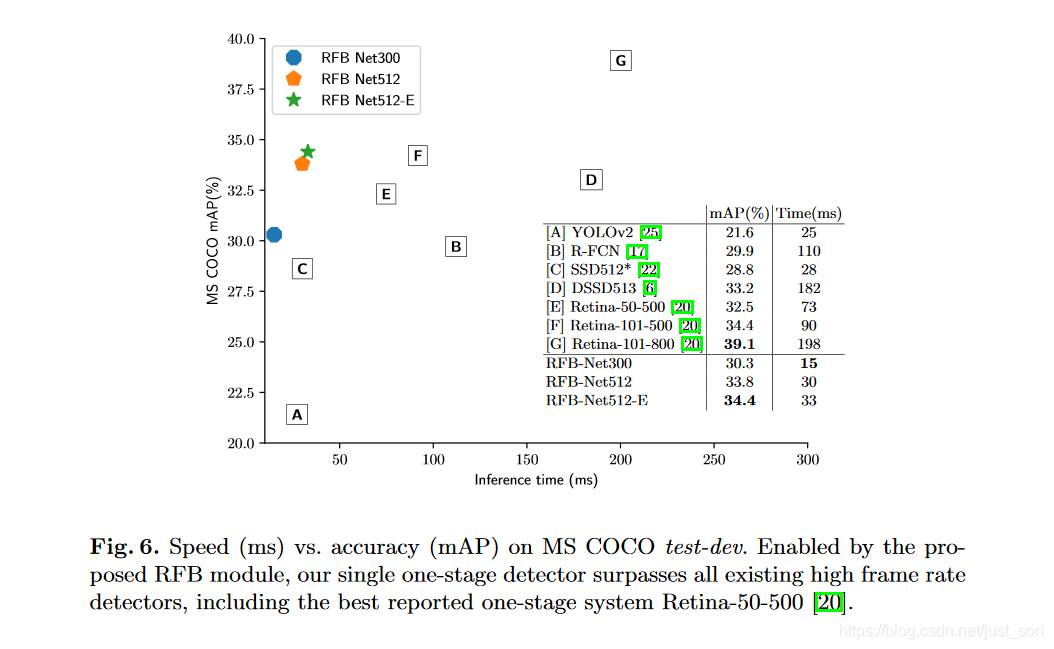
下面的Figure6展示了和RFBNet同时期的一些目标检测算法在COCO test-dev数据集上关于效果和速度的直观对比,可以看到RFBNet的速度和精度平衡还是不错的。
6. 后记¶
RFBNet说白了就是空洞卷积的应用,虽然看起来论文比较水,但至少给我们提供了一个重要信息,在检测中调感受野是行之有效的。
7. 附录¶
- 论文原文:https://arxiv.org/pdf/1711.07767.pdf
- 代码实现:https://github.com/ruinmessi/RFBNet
- 参考:https://blog.csdn.net/u014380165/article/details/81556769
8. 推荐阅读¶
欢迎关注GiantPandaCV, 在这里你将看到独家的深度学习分享,坚持原创,每天分享我们学习到的新鲜知识。( • ̀ω•́ )✧
有对文章相关的问题,或者想要加入交流群,欢迎添加BBuf微信:

本文总阅读量次