介绍¶
本文是旷视研究院CVPR2018上的一篇工作,在检测行人任务中,由于行人之间互相遮挡,导致传统的检测器容易受遮挡的干扰,给出错误的预测框。
研究人员先是从数据集上进行分析,定量描述了遮挡对行人检测带来的影响。后面受吸引,排斥的启发,提出了Repulsion Loss来尽可能让预测框贴近真实框的同时,又能与同类排斥,进而避免误检。
问题引入¶
常见的遮挡问题可以再被细分为主要两类 1. 类间遮挡,即目标被其他类遮挡住。举个例子,一个行人遛狗,人体下半部分就可能被狗狗遮住
- 类内遮挡,目标物体被同类遮挡住,在我们问题里面也就是行人遮挡。
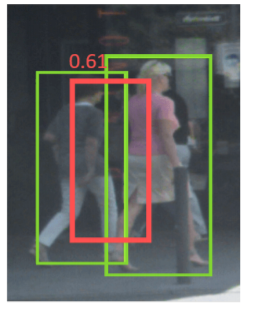
我们思考一下行人遮挡会对检测器造成什么影响。 假设我们目标行人是T,旁边被另外一个行人B所遮挡。那么B的真实框会导致我们对T的预测框P,往B去移动(shift),造成类似下图的情况
另外我们再考虑下目标检测常用的后处理NMS,非极大值抑制。NMS操作是为了抑制去除掉多余的框。 但是在行人检测中,NMS操作会带来更糟糕的检测结果。 还是刚刚的例子,我对T有一个预测框P,但因为距离B靠的太近,我可能会被B的预测框给抑制,导致行人检测中出现漏检。这也从另外一个侧面反映出行人检测对NMS阈值的敏感性,阈值太低了会带来漏检,阈值太高了会带来假正例(即标出错误的目标)
因此如何稳定的检测出群体中个体行人是行人检测器的关键。
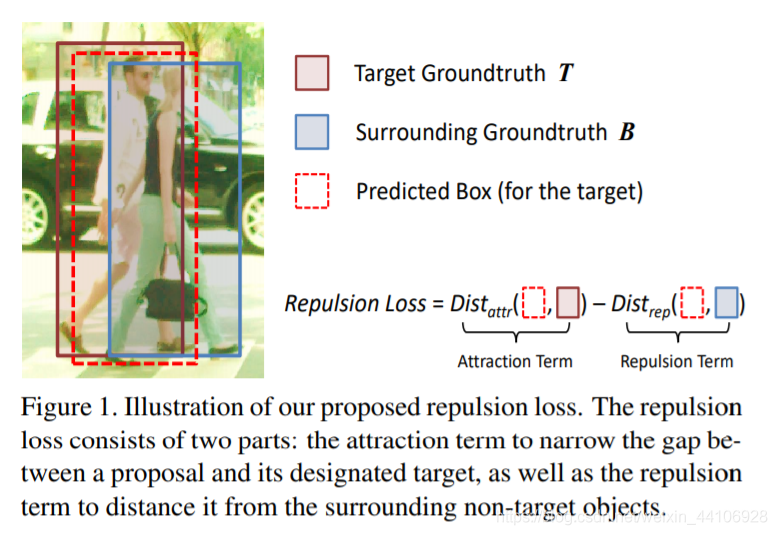
现有的方法仅仅要求预测框尽可能靠近目标框,而没有考虑周围附近的物体。 受磁铁同性相斥,异性相吸的原理,我们提出了一种RepLoss新的损失函数
该损失函数在要求预测框P靠近目标框T(吸引)的同时,也要求预测框P远离其他不属于目标T的真实框(排斥) 该损失函数很好的提升了行人检测模型的性能,并且降低了NMS对阈值的敏感性
人群遮挡的影响¶
数据集¶
我们采用了CityPersons数据集,该数据集有共约35000个行人。我们的实验都基于这个数据集进行,在评价当中,我们采用log miss rate的MR−2指标来进行衡量(也就是每张图片的漏检率上取平均值,再进行log计算,该值越低越好)
检测器¶
我们的基线检测器沿用了Faster RCNN,将骨干网络换成resnet。由于行人检测算是小目标检测任务,因此我们给resnet增加了空洞卷积,并将下采样改为8倍(原始224->7下采样是32倍)
简单改进后的目标检测器的MR指标由15.4下降到14.6,稍微提升了点。
小目标难检测原因(补充)¶
- 传统的分类网络为了减少计算量,都使用到了下采样,而下采样过多,会导致小目标的信息在最后的特征图上只有几个像素(甚至更少),信息损失较多
- 下采样扩张的感受野比较利于大目标检测,而对于小目标,感受野可能会大于小目标本身,导致效果较差
对失败案例的分析¶
我们在CityPerson数据集中,由于该数据集是从分割数据集得来的,因此我们有每个行人的可见区域,即BBox_visible
为了更好分析,我们定义了一个遮挡率,如下公式
由公式可知,当行人可见区域越小,遮挡率occ越大
我们设定occ >= 0.1即为一个遮挡的案例
而occ >=0.1 并且与其他行人的IoU >=0.1,我们定义为人群遮挡案例
基于这两类设定,我们又在原数据集上划分出两个子集,分别是reasonable-occ,reasonable-crowd
很显然,reasonable-crowd也是resonable-occ的子集

蓝色,橙色,灰色分别代表Reasonable-crowd子集,Reasonable-occ子集,Reasonable集合。可以看到crowd子集在occ子集中,占据了接近60%。这也从侧面说明了人群遮挡是遮挡中一个主要问题。
假正例分析¶
我们同时也分析了有多少假正例是由人群遮挡造成的 我们具体分为了三类,background,localization,crowd
- background是预测框与真实框的IoU<0.1
- localization是预测框仅与一个真实框的IoU>=0.1
- Crowd是预测框与多于两个真实框的IoU>=0.1
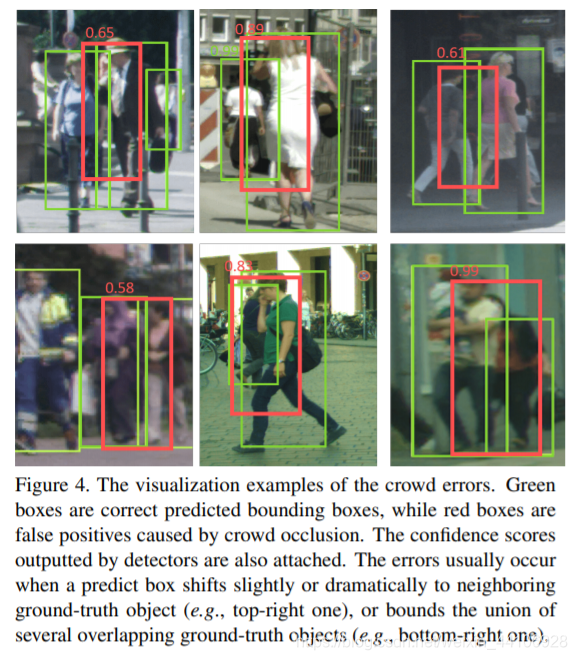
图中红框就是上述的crowd error,大约有20%的假正例都是由人群导致的 因为相邻的两个真实框,预测框或多或少产生偏移,导致预测错误
Repulsion Loss¶
前面分析了这么多错误,现在才是重头戏 Repulsion Loss主要由三部分构成
Lattr是为了预测框更接近真实框(即吸引)
Lrep则是为了让预测框远离周围的真实框(即排斥)
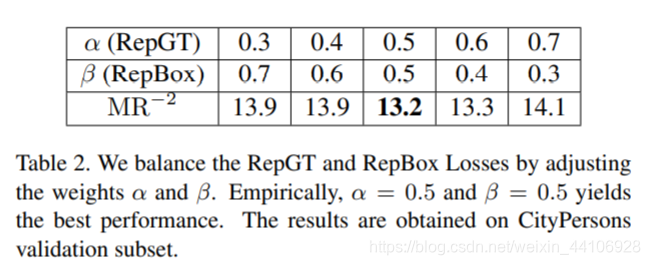
参数α和β用于平衡两者的权重
我们设 P(lP , tP , wP , hP )为候选框 G(lG, tG, wG, hG)为真实框
P+为正候选框集合,正候选框的意思是,至少与其中一个真实框的IoU大于某个阈值,这里是0.5 g = {G} 是真实框集合
Attraction term¶
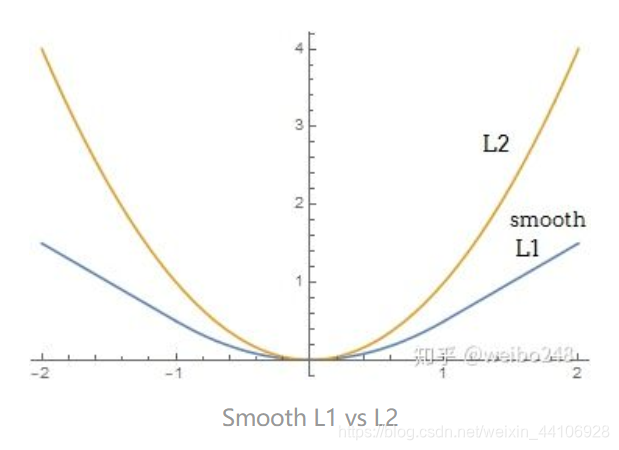
这一项loss在其他算法也广泛使用,为了方便比较,我们沿用smoothL1 Loss
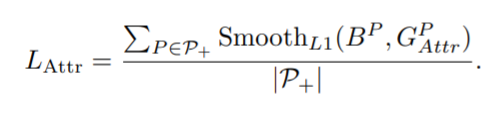
Smooth L1 Loss公式如下

这里我们的平滑系数取2
Repulsion Term (RepGT)¶
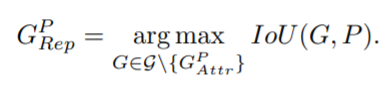
RepGT loss设计是为了远离非目标的真实框 对于一个候选框P,其排斥对象被定义为,除去本身要回归目标的真实框外,与其IoU最大的真实框
受IoU loss启发,我们定义了一个IoG
损失定义如下

这里没有采用smooth l1 loss而是smooth ln loss,其公式如下

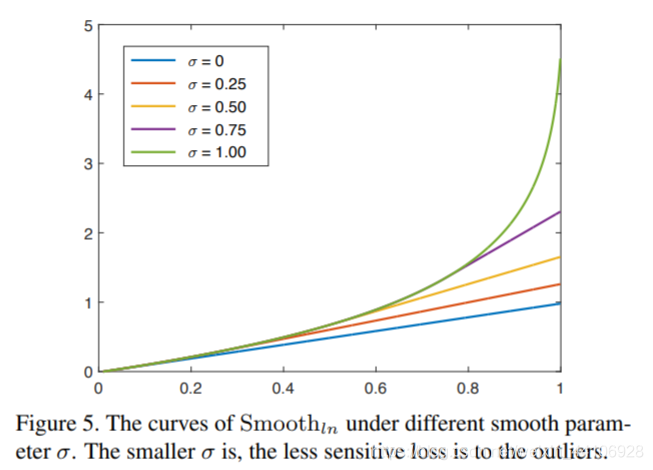
不同平滑系数,最后陡峭程度不一样。当一个候选框P与非目标的真实框重叠越多,其惩罚也越大。
Repulsion Term (RepBox)¶
这项损失是针对人群检测中,NMS处理对阈值敏感的问题 我们先将P+集合划分成互斥的g个子集(因为一共有g个目标物体)
然后从两个不同子集随机采样,分别得到两个互斥集合的预测框,即
我们希望这两个互斥集合出来的回归框,交叉的范围尽可能小,于是有了RepBox loss,公式如下

其中分母的I是identity函数,即
这里限制大于0,为了避免分式除0,我们这里加了个\epsilon极小值 上面依旧采用Smooth ln函数来计算。
引申讨论¶
距离函数选择¶
在惩罚项中,我们分别选择了IoG和IoU来进行度量。 其原因是IoG和IoU把范围限定在了(0, 1),与此同时 SmoothL1是无界的。 如果SmoothL1用在RepGT中,它会让预测框与非目标的gt框离的越远越好,而我们的初衷只是想减少交叉部分,相比之下,IoG更符合我们的思想
另外在RepGT中使用IoG而不使用IoU的原因是,IoG的分母下,真实框大小area(G)是固定的,因此其优化目标是去减少与目标框重叠,即area(B∩G)。而在IoU下,回归器也许会尽可能让预测框更大(即分母)来最小化loss
实验部分¶
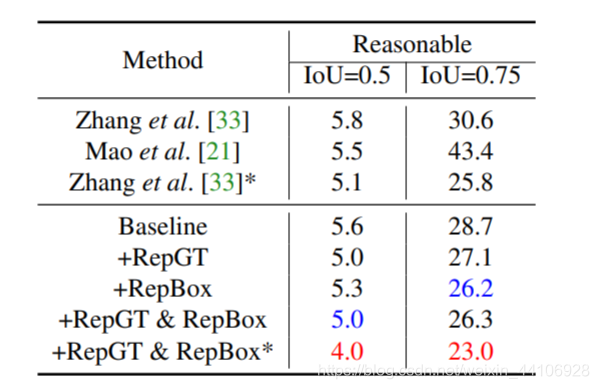
这里只简单介绍一下 我们在CityPerson和Caltech-USA分别训练了80k和160k个iter
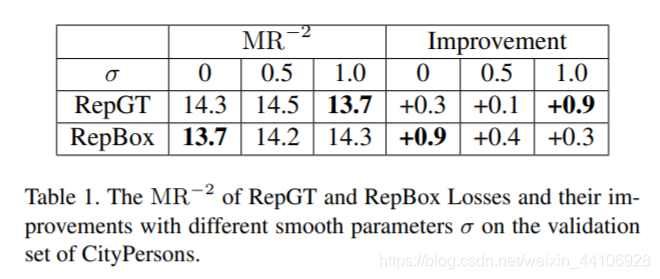
根据不同平滑系数,得到的提升也不一样 我们进一步调整两个loss的权重,相对得到了更好的效果
实验效果图如下,这是未经过NMS处理的锚框图
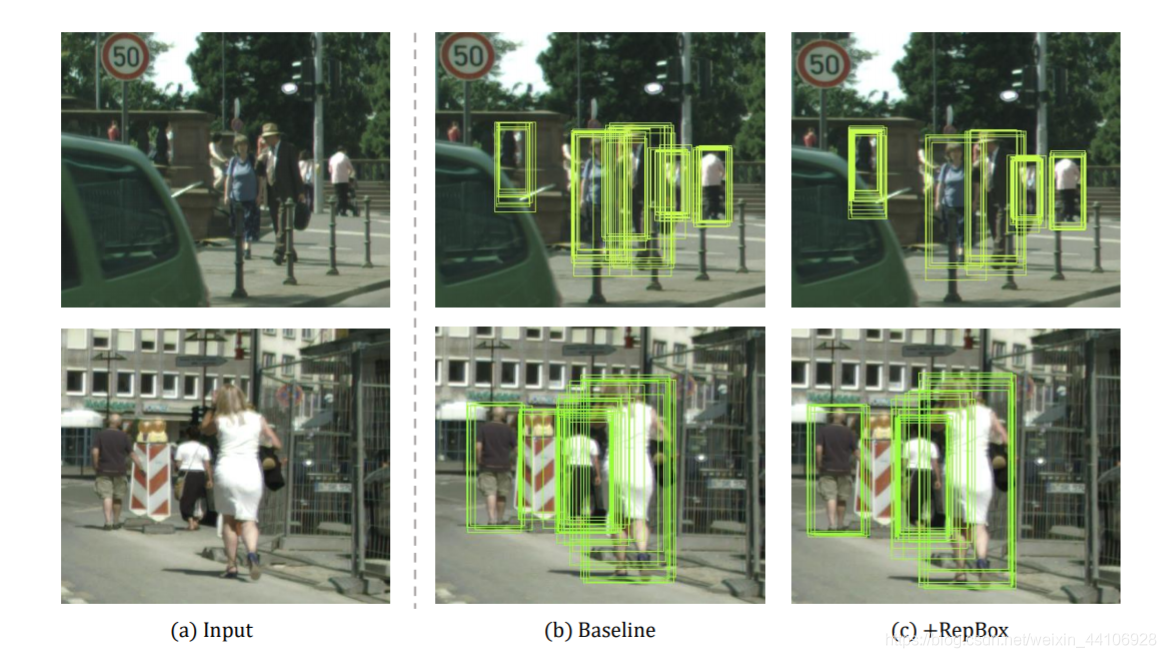
可以看到加了RepBox后,明显少了很多夹在在两个人中间的预测框,这也减少了后续NMS处理出错的情况。
代码解析¶
这里采用的是这版repulsion loss实现https://github.com/dongdonghy/repulsion-loss-faster-rcnn-pytorch/blob/master/lib/model/faster_rcnn/repulsion_loss.py
def IoG(box_a, box_b):
inter_xmin = torch.max(box_a[0], box_b[0])
inter_ymin = torch.max(box_a[1], box_b[1])
inter_xmax = torch.min(box_a[2], box_b[2])
inter_ymax = torch.min(box_a[3], box_b[3])
Iw = torch.clamp(inter_xmax - inter_xmin, min=0)
Ih = torch.clamp(inter_ymax - inter_ymin, min=0)
I = Iw * Ih
G = (box_b[2] - box_b[0]) * (box_b[3] - box_b[1])
return I / G
该函数用于计算IoG
def repgt(pred_boxes, gt_rois, rois_inside_ws):
sigma_repgt = 0.9
loss_repgt=torch.zeros(pred_boxes.shape[0]).cuda()
for i in range(pred_boxes.shape[0]):
boxes = Variable(pred_boxes[i,rois_inside_ws[i]!=0].view(int(pred_boxes[i,rois_inside_ws[i]!=0].shape[0])/4,4))
gt = Variable(gt_rois[i,rois_inside_ws[i]!=0].view(int(gt_rois[i,rois_inside_ws[i]!=0].shape[0])/4,4))
num_repgt = 0
repgt_smoothln=0
if boxes.shape[0]>0:
overlaps = bbox_overlaps(boxes, gt)
for j in range(overlaps.shape[0]):
for z in range(overlaps.shape[1]):
if int(torch.sum(gt[j]==gt[z]))==4:
overlaps[j,z]=0
max_overlaps, argmax_overlaps = torch.max(overlaps,1)
for j in range(max_overlaps.shape[0]):
if max_overlaps[j]>0:
num_repgt+=1
iog = IoG(boxes[j], gt[argmax_overlaps[j]])
if iog>sigma_repgt:
repgt_smoothln+=((iog-sigma_repgt)/(1-sigma_repgt)-math.log(1-sigma_repgt))
elif iog<=sigma_repgt:
repgt_smoothln+=-math.log(1-iog)
if num_repgt>0:
loss_repgt[i]=repgt_smoothln/num_repgt
return loss_repgt
这是RepGT_loss代码,首先进入predbox的for循环
经过一个for循环遍历,得到除去目标真实框外,与其IoU最大的真实框
再在for循环内,通过IoG函数计算IOG值,并根据smooth ln函数(平滑系数为sigma_regpt)
最后loss总和除以repgt的个数,取得平均值
def repbox(pred_boxes, gt_rois, rois_inside_ws):
sigma_repbox = 0
loss_repbox=torch.zeros(pred_boxes.shape[0]).cuda()
for i in range(pred_boxes.shape[0]):
boxes = Variable(pred_boxes[i,rois_inside_ws[i]!=0].view(int(pred_boxes[i,rois_inside_ws[i]!=0].shape[0])/4,4))
gt = Variable(gt_rois[i,rois_inside_ws[i]!=0].view(int(gt_rois[i,rois_inside_ws[i]!=0].shape[0])/4,4))
num_repbox = 0
repbox_smoothln = 0
if boxes.shape[0]>0:
overlaps = bbox_overlaps(boxes, boxes)
for j in range(overlaps.shape[0]):
for z in range(overlaps.shape[1]):
if z>=j:
overlaps[j,z]=0
elif int(torch.sum(gt[j]==gt[z]))==4:
overlaps[j,z]=0
iou=overlaps[overlaps>0]
for j in range(iou.shape[0]):
num_repbox+=1
if iou[j]<=sigma_repbox:
repbox_smoothln+=-math.log(1-iou[j])
elif iou[j]>sigma_repbox:
repbox_smoothln+=((iou[j]-sigma_repbox)/(1-sigma_repbox)-math.log(1-sigma_repbox))
if num_repbox>0:
loss_repbox[i]=repbox_smoothln/num_repbox
return loss_repbox
这是RepBox loss代码,第一个for循环也是进入到预测框。然后一个小for循环用来计算overlap,这里还设置一个if语句块,用来排除相同的集合(因为我们要保证两个集合是互斥的子集)。随后与RepGT类似,计算smoothln函数,最后取平均返回
总结¶
旷厂的这篇算法工作做的还是很扎实的,作者先是对数据集进行分析,进而根据遮挡度,拆分出两个子集,通过直观的统计来表明行人遮挡是检测行人的一大难点。然后从预测框和NMS处理上出发,找到问题所在,进而提出RepLoss,其中两项loss分别针对两个独立的问题。简单改进模型后,加上RepLoss的效果展示还是非常不错的。
本文总阅读量次