优化与深度学习之间的关系¶
在深度学习任务中,我们常常会为模型定义一个损失函数,损失函数表征的是预测值和实际值之间的差距,再通过一定的优化算法减小这个差距
然后绝大多数情况下,我们的损失函数十分复杂,不像我们解数学题能得到一个确定,唯一的解析解。而是通过数学的方法去逼近一个解,也称数值解
局部最小值和全局最小值¶
假设我们的损失函数是
import matplotlib.pyplot as plt
import numpy as np
x = np.arange(-2, 2, 0.01)
print(x)
f = x*np.cos(np.pi*x)
plt.plot(x, f)
plt.show()
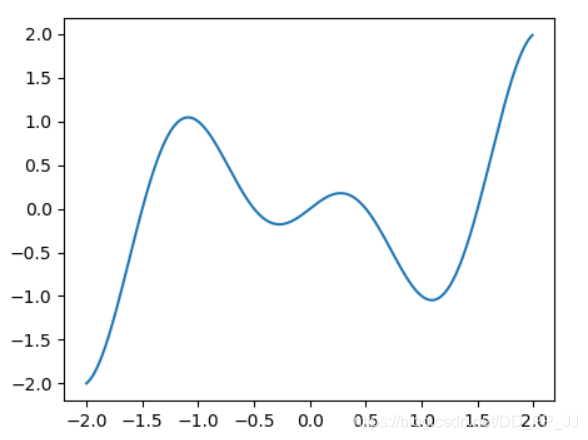
我只画出了区间(-2, 2)的函数图像,通过观察图像,我们发现该函数有两个波谷,分别是局部最小值和全局最小值。
到达局部最小值的时候,由损失函数求得的梯度接近于0,我们很难再跳出这个局部最小值,进而优化到全局最小值,即x=1处,这也是损失函数其中的挑战
鞍点¶
假设我们的损失函数为
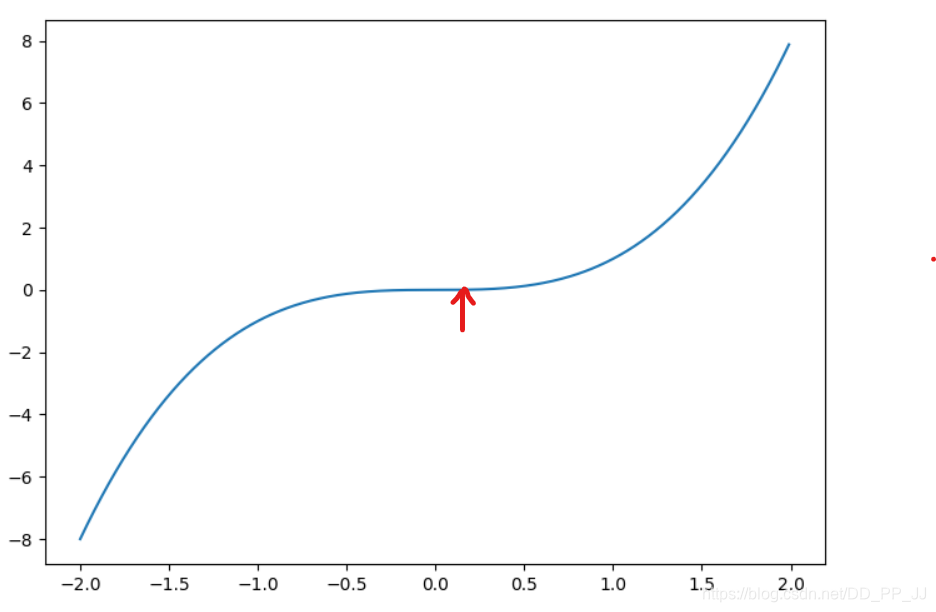
文章所标的点,即是鞍点(saddle point),形状像马鞍处。
它的特点也是两边的梯度趋近于0,但并不是真正的最小值点
在深度学习优化过程中,这两种情况很常见,我们需要尽可能地通过数学方式去逼近最优
梯度下降为什么有效¶
这里需要用到高数里面的泰勒展开公式
其中
由于ε是个极小值,所以我们可以用梯度乘上一个很小的数,去替代
由于梯度的平方是恒大于0的,因此有
看到这里大家应该就明白了,其中n代表的是超参数学习率,我们通过让x减去一个常数乘以学习率,使得目标损失函数值得到下降
接下来我会以函数
作为一个梯度下降例子
以下是我的画图代码
import matplotlib.pyplot as plt
import numpy as np
def gradient_optimizer(eta):
x = 0.5
results = [x]
for i in range(5):
# 函数x*np.cos(np.pi*x)的导数为np.cos(np.pi * x) - x * np.sin(np.pi * x)
x -= eta * (np.cos(np.pi * x) - x * np.sin(np.pi * x))
results.append(x)
return results
res = gradient_optimizer(0.1)
def fx(arr):
ans = []
for num in arr:
ans.append(num * np.cos(np.pi * num))
return ans
def plot():
x = np.arange(-2, 2, 0.01)
y = x * np.cos(np.pi * x)
res_y = fx(res)
plt.plot(x, y)
plt.plot(res, res_y, '-o')
plt.show()
plot()
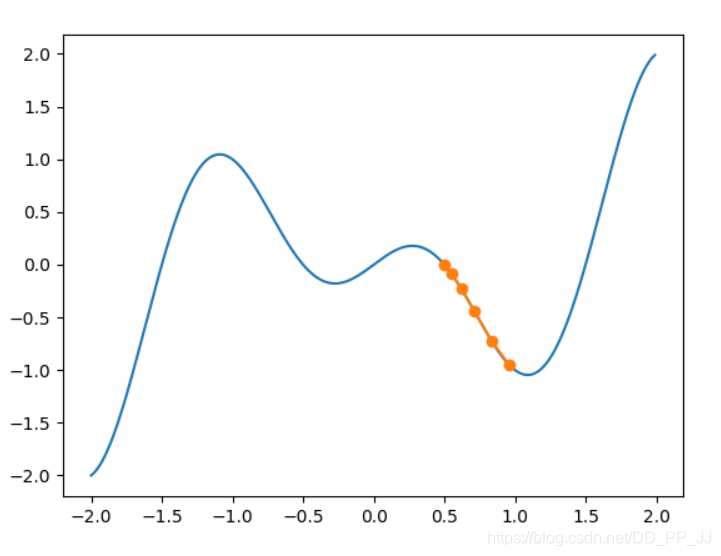
函数从x=0.5开始,很顺利的优化到了全局最小值的地方
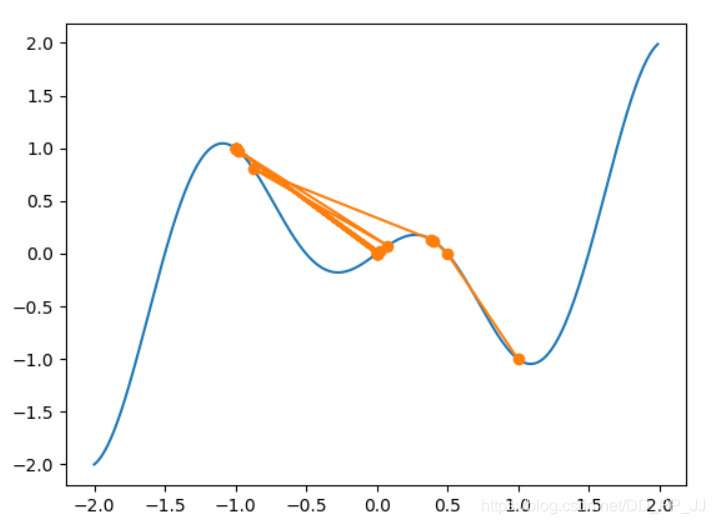
那么我们换到x = -1.0,并增加迭代步伐,再次观察梯度下降情况
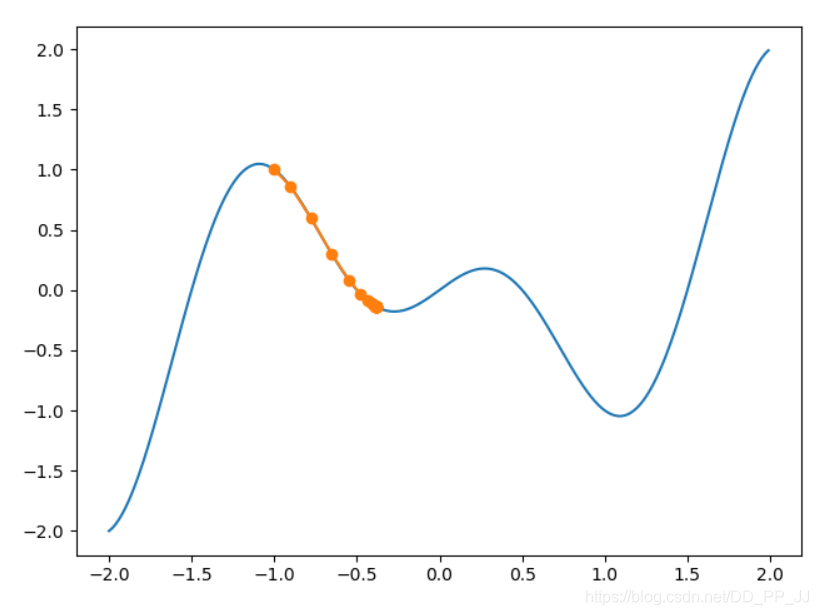
我们将迭代步伐调至20,可见我们卡在局部最小值,无法跳出
那么我们试试增大学习率,看能不能跳出来
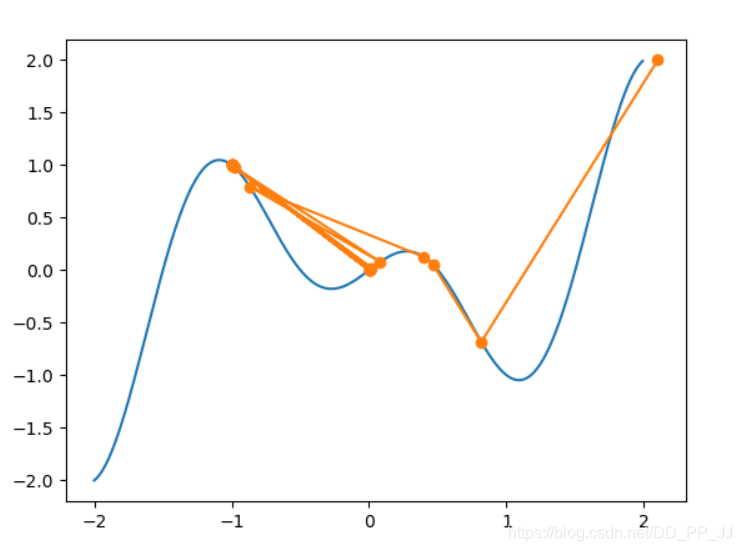
我将eta设置为1.000542(PS:。。这个函数太刁钻了,调了半天学习率才达到想要的结果)
可以看见再经历过一系列震荡后,我们的函数成功到达了全局最小值点,当然背后是我找这个参数的心酸。
我们再把学习率参数调大一点点,将eta设置为1.0055
这里我们也可以看得出学习率的关系
当学习率很小,我们下降较为平滑,但容易卡在局部最小值点
当学习率很大,我们梯度优化过程中会十分剧烈,可能达到全局最小值点,但也很可能距离优化目标越来越远
随机梯度下降SGD¶
假设我们有n个样本数据,那么每次进行梯度下降,我们需要分别对每个数据计算其梯度。
时间复杂度为O(n),当样本很多的时候,这个计算开销是非常大的。
随机梯度下降则是在梯度下降每次迭代当中,随机采取一个样本,计算其梯度,作为整体梯度进行下降,我们的计算开销也就下降到了O(1)
为了梯度值更稳定,我们也可以选择小批量随机梯度下降,以一小批样本的梯度作为整体的梯度估计
动量法Momentum¶
我们实际优化的函数会十分复杂,最常见的函数是多维的情况。当函数在某个方向上变化十分剧烈,则对应方向上的梯度变化也十分剧烈,为了达到收敛,需要更多时间步迭代。
梯度变化剧烈的另外一个原因是,我们单一地考虑了当前的梯度,而忽略了以前的梯度情况。
当我们把以前的梯度加入到当前梯度计算中,会缓解这种问题,加速收敛
动量法引入了一个速度变量,初始化为0,由以下两个公式进行变量维护
指数移动平均¶
这里参考的是mxnet出品的动手学教程
我们假设有下面公式
继续展开得到
简单来说,指数移动平均就是计算近几个时间步的加权平均,时间越近,对应的权重就越大
接下来我们对动量法的速度变量进行变形
我们相当于是对
这一项做了移动平均。因此动量法能综合考虑一定量时间步内的梯度情况
AdaGrad算法¶
在前面两种优化算法里,自变量的每一个元素都是使用同一学习率来自我迭代。
而在前面我们对学习率讨论中,不同学习率所带来的优化效果也不同。
因此我们在思考能否提出一个自适应学习率调整的优化算法
AdaGrad算法维护一个状态变量
通过以下两个公式进行迭代更新
我们可以看到状态变量S每次都是通过梯度按元素平方进行迭代,这样每个变量就有自己特定的学习率,而且状态变量放置在分母下,能逐步调小学习率, 不需要人为进行调整。
缺点就是可能模型还未收敛,学习率已经过小,很难找到合适的数值解
RMSProp算法¶
既然AdaGrad缺点是因为平方函数是个递增函数,一直迭代会让学习率持续下降。
那么我们不妨将动量法的移动平均思想,用于处理状态变量s
因此RMSProp算是结合了Adagrad和Momentum的思想
计算公式如下
移动平均并不是一个单调递增的函数,因此它能更好地调节学习率
Adam算法¶
Adam算法则是结合了RMSProp和Momentum算法
它在RMSProp算法基础上也对梯度变量做了指数加权移动平均
公式如下
这里对速度变量做的指数移动平均与动量法的方法有点区别
在t较小的时候,各个时间步权值之和不为1
因此需要做个偏差修正
然后调整每个元素的学习率
本文总阅读量次