前言¶
这是OpenCV图像处理专栏的第六篇文章,我们一起来看看何凯明博士这篇CVPR 2009最佳论文。这篇论文的灵感来自于作者的两个观察,第一个是在3D游戏中的雾使得作者坚信人眼有特殊的东西去感知雾,而不仅仅是靠对比度。第二个是作者阅读了之前的一篇去雾方面的论文《Single Image Dehazing》,发现这篇论文中的Dark Object Subtraction可以处理均匀的雾,但是非均匀的就处理不好,所以作者尝试在局部使用了Dark Object Subtraction,然后得到了惊人的效果。
原理¶
- 暗通道先验:首先说在绝大多数非天空的局部区域里,某一些像素总会有至少一个颜色通道具有很低的值,也就是说该区域光强是一个很小的值。所以给暗通道下了个数学定义,对于任何输入的图像J,其暗通道可以用下面的公式来表示:

其中J^C表示彩色图像每个通道,Ω(x)表示以像素X为中心的一个窗口。要求暗通道的图像是比较容易的,先求出每个像素在3个通道的最小值,存到一个二维Mat中(灰度图),然后做一个最小值滤波,滤波的半径由窗口大小决定,这里窗口大小为WindowSize,公式表示为WindowsSize=2*Radius+1,其中Radius表示滤波半径。

暗通道先验理论得出的结论,这个我不知道如何证明,不过论文给出了几个原因:
- a)汽车、建筑物和城市中玻璃窗户的阴影,或者是树叶、树与岩石等自然景观的投影;
- b)色彩鲜艳的物体或表面,在RGB的三个通道中有些通道的值很低(比如绿色的草地/树/植物,红色或黄色的花朵/叶子,或者蓝色的水面);
- c)颜色较暗的物体或者表面,例如灰暗色的树干和石头。
总之,自然景物中到处都是阴影或者彩色,这些景物的图像的暗原色总是很灰暗的。作者在论文中,统计了5000多副图像的特征,也都基本符合这个先验。因此,我们可以认为它是一条定理。
- 基于这个先验,就是该论文中最核心的部分了。首先,在计算机视觉和图像处理中,下面这个雾生成模型被广泛的应用:I(x)=J(x)t(x)+A(1-t(x)),其中I(x)是我们待处理的图像,J(x)是我们要恢复的没有雾的图像,A是全球大气光成分,t(x)为透射率。现在已知了I(X),我们需要求取J(X),显然这个不定方程有无数解,所以还需要定义一些先验。
-
将上式处理变形得到:\frac{I^c(x)}{A^c}=t(x)\frac{J^c(x)}{A^c}+1-t(x),其中上标c代表R、G、B三个通道。然后假设在每一个窗口中透射率t(x)是一个常数,定义为\hat{t(x)}并且A值已经给定,然后对这个式子左右两边同时取2次最小值,得到下面的式子:
-

其中\hat{t(x)}就是公式(8)中那个t(x)部分,因为我不知道怎么用markdown语法写这个符号。 上式中,J是待求的无雾的图像,根据前述的暗原色先验理论有:

因此,可推导出:

把式(10)带入式(8)中,得到:

这就是透射率\hat{t(x)}的预估值。 在现实生活中,即使是晴天白云,空气中也存在着一些颗粒,因此,看远处的物体还是能感觉到雾的影响,另外,雾的存在让人类感到景深的存在,因此,有必要在去雾的时候保留一定程度的雾,这可以通过在式(11)中引入一个在[0,1] 之间的系数,则式(11)被修正为:

本推文中所有的测试结果依赖于: ω=0.95。
-
上述的推导是基于A已知的情况下,然而事实是A还不知道呢?A怎么计算呢?在实际中,我们可以借助于暗通道图来从有雾图像中获取该值。具体步骤如下:(1)从暗通道图中按照亮度的大小取前0.1%的像素。(2)在这些位置中,在原始有雾图像I中寻找对应的具有最高亮度的点的值,作为A值。 到这一步,我们就可以进行无雾图像的恢复了。由I(x)=J(x)t(x)+A(1-t(x)),推出 J(x)=(I(x)-A)/t(x)+A,现在I、A、t都已经求得了,因此,完全进行出J,也就是去雾后的图像了。当投射图t的值很小时,会导致J的值偏大,从而使得图像整体向白场过度,因此一般可设置一阈值t_0,当t值小于t_0时,令t=t_0,本推文中所有效果图均以t_0=0.1为标准计算得来。
-
最终的结果计算表示为:

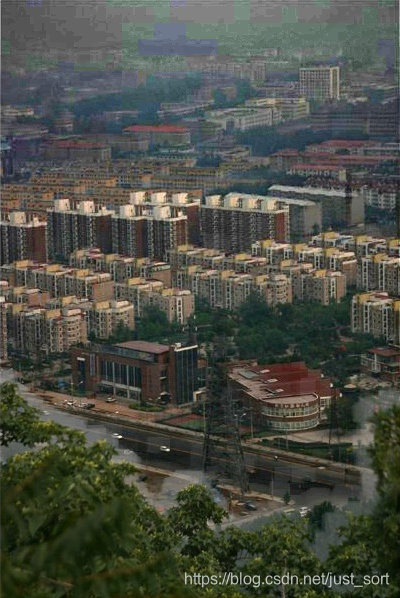
按照上面的公式复现了论文,给几张图片测试结果,都是原图和算法处理后的图这样的顺序:






代码实现¶
#include <opencv2/opencv.hpp>
#include <iostream>
#include <algorithm>
#include <vector>
using namespace cv;
using namespace std;
int rows, cols;
//获取最小值矩阵
int **getMinChannel(cv::Mat img){
rows = img.rows;
cols = img.cols;
if(img.channels() != 3){
fprintf(stderr, "Input Error!");
exit(-1);
}
int **imgGray;
imgGray = new int *[rows];
for(int i = 0; i < rows; i++){
imgGray[i] = new int [cols];
}
for(int i = 0; i < rows; i++){
for(int j = 0; j < cols; j++){
int loacalMin = 255;
for(int k = 0; k < 3; k++){
if(img.at<Vec3b>(i, j)[k] < loacalMin){
loacalMin = img.at<Vec3b>(i, j)[k];
}
}
imgGray[i][j] = loacalMin;
}
}
return imgGray;
}
//求暗通道
int **getDarkChannel(int **img, int blockSize = 3){
if(blockSize%2 == 0 || blockSize < 3){
fprintf(stderr, "blockSize is not odd or too small!");
exit(-1);
}
//计算pool Size
int poolSize = (blockSize - 1) / 2;
int newHeight = rows + blockSize - 1;
int newWidth = cols + blockSize - 1;
int **imgMiddle;
imgMiddle = new int *[newHeight];
for(int i = 0; i < newHeight; i++){
imgMiddle[i] = new int [newWidth];
}
for(int i = 0; i < newHeight; i++){
for(int j = 0; j < newWidth; j++){
if(i < rows && j < cols){
imgMiddle[i][j] = img[i][j];
}else{
imgMiddle[i][j] = 255;
}
}
}
int **imgDark;
imgDark = new int *[rows];
for(int i = 0; i < rows; i++){
imgDark[i] = new int [cols];
}
int localMin = 255;
for(int i = poolSize; i < newHeight - poolSize; i++){
for(int j = poolSize; j < newWidth - poolSize; j++){
localMin = 255;
for(int k = i-poolSize; k < i+poolSize+1; k++){
for(int l = j-poolSize; l < j+poolSize+1; l++){
if(imgMiddle[k][l] < localMin){
localMin = imgMiddle[k][l];
}
}
}
imgDark[i-poolSize][j-poolSize] = localMin;
}
}
return imgDark;
}
struct node{
int x, y, val;
node(){}
node(int _x, int _y, int _val):x(_x),y(_y),val(_val){}
bool operator<(const node &rhs){
return val > rhs.val;
}
};
//估算全局大气光值
int getGlobalAtmosphericLightValue(int **darkChannel, cv::Mat img, bool meanMode = false, float percent = 0.001){
int size = rows * cols;
std::vector <node> nodes;
for(int i = 0; i < rows; i++){
for(int j = 0; j < cols; j++){
node tmp;
tmp.x = i, tmp.y = j, tmp.val = darkChannel[i][j];
nodes.push_back(tmp);
}
}
sort(nodes.begin(), nodes.end());
int atmosphericLight = 0;
if(int(percent*size) == 0){
for(int i = 0; i < 3; i++){
if(img.at<Vec3b>(nodes[0].x, nodes[0].y)[i] > atmosphericLight){
atmosphericLight = img.at<Vec3b>(nodes[0].x, nodes[0].y)[i];
}
}
}
//开启均值模式
if(meanMode == true){
int sum = 0;
for(int i = 0; i < int(percent*size); i++){
for(int j = 0; j < 3; j++){
sum = sum + img.at<Vec3b>(nodes[i].x, nodes[i].y)[j];
}
}
}
//获取暗通道在前0.1%的位置的像素点在原图像中的最高亮度值
for(int i = 0; i < int(percent*size); i++){
for(int j = 0; j < 3; j++){
if(img.at<Vec3b>(nodes[i].x, nodes[i].y)[j] > atmosphericLight){
atmosphericLight = img.at<Vec3b>(nodes[i].x, nodes[i].y)[j];
}
}
}
return atmosphericLight;
}
//恢复原图像
// Omega 去雾比例 参数
//t0 最小透射率值
cv::Mat getRecoverScene(cv::Mat img, float omega=0.95, float t0=0.1, int blockSize=15, bool meanModel=false, float percent=0.001){
int** imgGray = getMinChannel(img);
int **imgDark = getDarkChannel(imgGray, blockSize=blockSize);
int atmosphericLight = getGlobalAtmosphericLightValue(imgDark, img, meanModel=meanModel, percent=percent);
float **imgDark2, **transmission;
imgDark2 = new float *[rows];
for(int i = 0; i < rows; i++){
imgDark2[i] = new float [cols];
}
transmission = new float *[rows];
for(int i = 0; i < rows; i++){
transmission[i] = new float [cols];
}
for(int i = 0; i < rows; i++){
for(int j = 0; j < cols; j++){
imgDark2[i][j] = float(imgDark[i][j]);
transmission[i][j] = 1 - omega * imgDark[i][j] / atmosphericLight;
if(transmission[i][j] < 0.1){
transmission[i][j] = 0.1;
}
}
}
cv::Mat dst(img.rows, img.cols, CV_8UC3);
for(int channel = 0; channel < 3; channel++){
for(int i = 0; i < rows; i++){
for(int j = 0; j < cols; j++){
int temp = (img.at<Vec3b>(i, j)[channel] - atmosphericLight) / transmission[i][j] + atmosphericLight;
if(temp > 255){
temp = 255;
}
if(temp < 0){
temp = 0;
}
dst.at<Vec3b>(i, j)[channel] = temp;
}
}
}
return dst;
}
int main(){
cv::Mat src = cv::imread("/home/zxy/CLionProjects/Acmtest/4.jpg");
rows = src.rows;
cols = src.cols;
cv::Mat dst = getRecoverScene(src);
cv::imshow("origin", src);
cv::imshow("result", dst);
cv::imwrite("../zxy.jpg", dst);
waitKey(0);
}
参考文章¶
论文原文:https://ieeexplore.ieee.org/document/5567108
参考博客:https://www.cnblogs.com/Imageshop/p/3281703.html
我的github链接:https://github.com/BBuf/Image-processing-algorithm
后记¶
关于何凯明博士的暗通道去雾算法就介绍到这里了,希望对你有帮助。代码也可以在我的github获取哦。
欢迎关注我的微信公众号GiantPandaCV,期待和你一起交流机器学习,深度学习,图像算法,优化技术,比赛及日常生活等。
本文总阅读量次