前言¶
前面介绍了CVPR 2019的GIoU Loss,推文地址如下:点这里,同时GIoU Loss里面也引入了IoU Loss,这个首先需要明确一下。然后AAAI 2020来了一个新的Loss,即是本文要介绍的DIoU Loss。论文原文地址见附录。
背景¶
我们先来回归一下IoU Loss和GIoU Loss。IoU Loss可以表示为:L_{IoU}=1-\frac{|B \bigcap B^{gt}|}{|B\bigcup B^{gt}|},从IoU的角度来解决回归损失,但它的缺点是当两个框不想交时,IOU-Loss始终为1,无法给出优化方向。因此GIoU来了,GIoU可以用下面的公式表示:
L_{GIoU}=1-IoU+\frac{|C-B \cup B^{gt}|}{|C|}
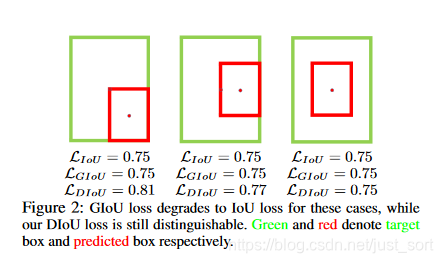
可以看到GIoU在IoU的基础上添加了一项,其中C表示包含两个框的最小矩形,这样就可以优化两个框不相交的情况。但GIoU仍然存在一个问题是,当两个框相交时,GIoU损失退化为了IoU损失。导致在预测框bbox和ground truth bbox包含的时候优化变得非常困难,特别是在水平和垂直方向收敛难。这里一个猜想是在水平和垂直方向,C值的增长没有在其他方向快,因此对这两个方向的惩罚力度不够,导致放慢了收敛速度。如论文的Figure2和Fiigure4所示:
同时为了更加形象的说明这一点,我们看一下论文的Figure1:
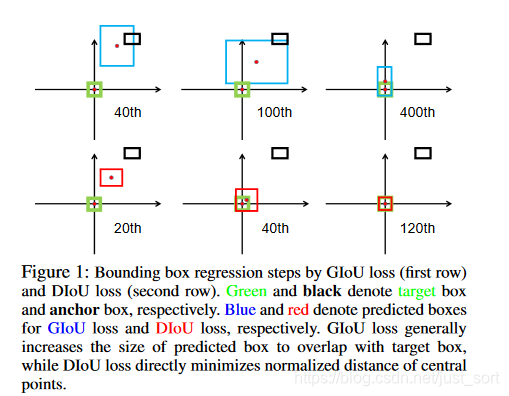
其中Figure1中的上面3张图表示GIoU的回归过程,其中绿色框为目标框,黑色框为Anchor,蓝色框为不同迭代次数后,Anchor的偏移结果。第2行的3张图则表示了DIoU的回归过程。从图中可以看到,在GIoU的回归过程中,从损失函数的形式我们发现,当IoU为0时,GIoU会先尽可能让anchor能够和目标框产生重叠,之后GIoU会渐渐退化成IoU回归策略,因此整个过程会非常缓慢而且存在发散的风险。而DIoU考虑到anchor和目标之间的中心点距离,可以更快更有效更稳定的进行回归。
问题提出¶
基于上诉分析,作者提出了如下两个问题:
- 一,直接最小化Anchor和目标框之间的归一化距离以达到更快的收敛速度是否可行?
- 二,如何使回归损失在与目标框有重叠甚至有包含关系时更准确,收敛更快?
DIoU Loss¶
论文为了解决第一个问题,提出了Distance-IoU Loss(DIoU Loss)。

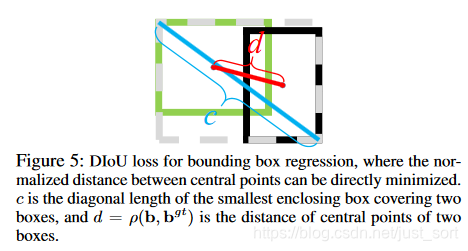
这个损失函数中,b,b^{gt}分别代表了Anchor框和目标框的中心点,p代表计算两个中心点的欧式距离,c代表的是可以同时覆盖Anchor框和目标框的最小矩形的对角线距离。因此DIoU中对Anchor框和目标框之间的归一化距离进行了建模。直观展示如Figure 5所示:
DIoU Loss的优点如下:
- 和GIoU Loss类似,DIoU Loss在和目标框不重叠时,仍然可以为边界框提供移动方向。
- DIoU Loss可以直接最小化两个目标框的距离,因此比GIoU Loss收敛快得多。
- 对于包含两个框在水平方向和垂直方向上这种情况,DIoU Loss可以使回归Loss 下降非常快,而GIoU Loss几乎退化为IoU Loss。
CIoU Loss¶
为了回答第二个问题,作者提出了Complete-IoU Loss。一个好的目标框回归损失应该考虑三个重要的几何因素:重叠面积,中心点距离,长宽比。GIoU为了归一化坐标尺度,利用IOU并初步解决了IoU为0无法优化的问题。然后DIoU损失在GIoU Loss的基础上考虑了边界框的重叠面积和中心点距离。所以还有最后一个点上面的Loss没有考虑到,即Anchor的长宽比和目标框之间的长宽比的一致性。基于这一点,论文提出了CIoU Loss。

从上面的损失可以看到,CIoU比DIoU多了\alpha和v这两个参数。其中\alpha是用来平衡比例的系数,v是用来衡量Anchor框和目标框之间的比例一致性。它们的公式如下:


然后在对w和h求导的时候,公式如下:
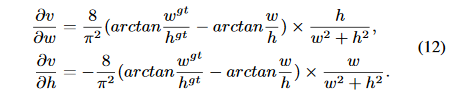
因为w^2+h^2这一项在计算的时候会变得很小,因为w,h的取值范围是[0,1]。而在回归问题中回归很大的值是很难的,因此一般都会对原始的w,h分别处以原图像的长宽。所以论文直接将w^2+h^2设为常数11,这样不会导致梯度的方向改变,虽然值变了,但这可以加快收敛。
从\alpha的定义式来看,损失函数会更加倾向于往重叠区域增多的方向优化,尤其是IoU为0的情况,这满足我们的要求。 同时,在进行nms阶段,一般的评判标准是IOU,这个地方作者推荐替换为DIOU,这样考虑了中心点距离这一个信息,效果又有一定的提升。

可视化实验¶
论文做了一个有趣的实验来探索IoU和GIoU存在的问题,我觉得还是有必要介绍一下,实验如Figure3所示:
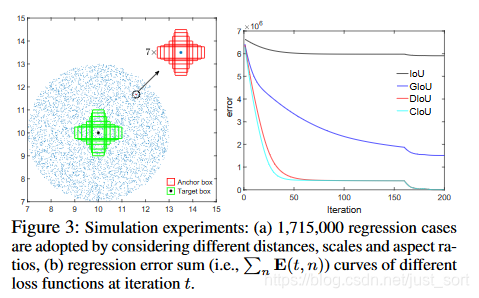
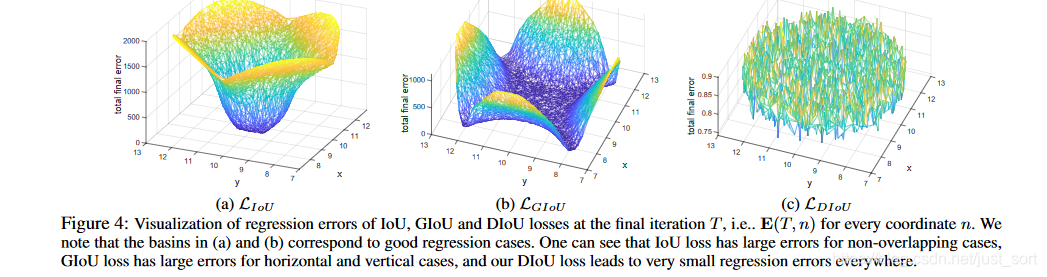
其中,绿色的框代表回归任务需要回归的7个不同尺度的目标框,7个目标框的中心坐标都是[10,10]。蓝色的点代表了所有Anchor的中心点,各个方向都有,各个距离也都有。一共有5000个蓝色点,有5000\times 7\times 7个Anchor框,并且每个框都需要回归到7个目标框去,因此一共有5000\times 7\times 7\times 7个回归等式。从Figure3(b)中我们可以看到在训练同样的代数后(200次),三个loss最终每个Anchor的误差分布。从IoU误差的曲线我们可以发现,Anchor越靠近边缘,误差越大,那些与目标框没有重叠的Anchor基本无法回归。从GIoU误差的曲线我们可以发现,对于一些没有重叠的Anchor,GIoU的表现要比IoU更好。但是由于GIoU仍然严重的依赖IoU,因此在两个垂直方向,误差很大,基本很难收敛,这就是GIoU不稳定的原因。从DIoU误差的曲线我们可以发现,对于不同距离,方向,面积和比例的Anchor,DIoU都能做到较好的回归。CIoU类似。
实验结论¶
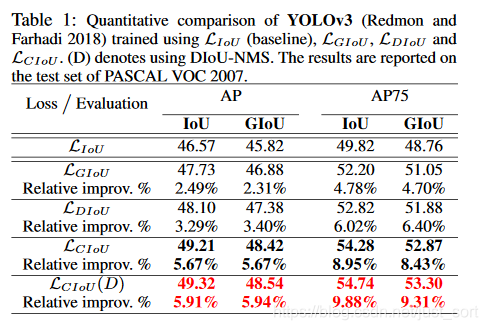
Table1给出了分别在YOLOv3上使用IoU Loss,GIoU Loss,DIoU Loss, CIoU Loss获得的AP值。可以看到CIoU Loss涨了快3个点,证明了这种Loss的有效性。遗憾的是论文没有给出其他的对比数据了,究竟有没有用欢迎大家去试,个人认为这种带有工程性Trick的论文是最值得去尝试的。
附录¶
论文原文:https://arxiv.org/pdf/1911.08287.pdf 参考博客:https://blog.csdn.net/qiu931110/article/details/103330107 源码实现:https://github.com/Zzh-tju/DIoU-darknet
后记¶
关于DIoU Loss和CIoU Loss就介绍到这里了,希望对大家目标检测升点有帮助。
欢迎关注我的微信公众号GiantPandaCV,期待和你一起交流机器学习,深度学习,图像算法,优化技术,比赛及日常生活等。
本文总阅读量次